 平台热线
平台热线





浅谈编码器精度、分辨率对伺服速度环的影响
注:本文章文字、图片部分来自网络
版权归原作者,侵删。
您是否对将工业自动化集成到您的设施中感兴趣?如果是这样,那么您应该致电工业自动化和集成领域的领导者工博士。工博士是包括FANUC,Yaskawa,KUKA,Kawasaki和ABB在内的多家不同机器人公司的认证集成商。我们的员工致力于帮助您为您的行业和预算构建和定制完美的自动化系统。
环系统中编码器作为反馈环节时影响控制系统的性能主要有以下三个方面:
一、响应速度、精度和分辨率
1、响应速度:响应速度容易理解的,反应迟钝的编码器就像一个理想的传感器串联一个低通滤波器,这样在整个闭环控制系统中会产生相位滞后,以至于影响了整个系统高频段的稳定性。现在大多数的应用中,伺服电机的编码器反馈速度非常快,可以看作是理想的传感器。但是有些通信速率较低的串行通信编码器(SSI)其通信方式不可避免的引起一定的延迟,导致速度环的带宽受到限制。
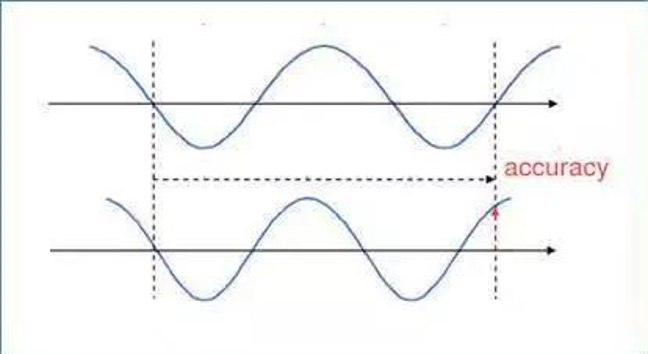
2、精度:对于精度的影响,我们首先需要定义速度精度的概念,精度是衡量实际值和设定值之间可重复的平均偏差的量值。速度精度的说明如图1所示,其表示一段时间内的设定值和实际值的整体偏差,因此所谓速度精度可以理解为被调量与规定的给定值的**稳态误差。
▲ 图1 速度精度(accuracy)图示
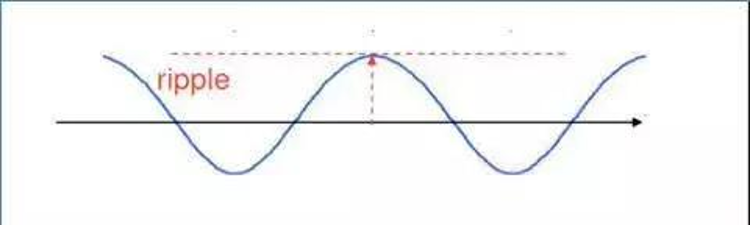
3、稳定度:虽然很多调节目标中都涉及到了精度,但在实际上大多数情况下,我们更希望得到的是调节过程的 “稳定度”。这个稳定度又可以理解为速度的 “波动性”。速度波动性的定义为: 波动性是不期望的实际值特性,它会叠加在速度平均值上。
▲ 图2 速度波动性(ripple)图示
对于使用西门子的SINAMICS S120系列变频器及伺服电机的伺服控制系统,在实验室环境中,电机工作在额定转速及额定转矩时,转速精度可以达到额定转速的0.001%,如下表所示。
示例:使用S120 驱动1FK7032-2AK71-1QA0 伺服电机,此电机额定转速6000 RPM,电机的编码器为20位单圈**值。
我们使用60 RPM转速运行,记录增量脉冲数(R482)与实际转速(R61),如图3所示:

▲ 图3 R482及R61的记录
我们记录3s的时间间隔,不考虑误差因素,电机应该增加3*220=3145728个增量脉冲信号。但是,实际上电机旋转了3145731个增量脉冲数,其误差值为3个增量脉冲数,转换为转速为60+(3/3145728)*60=60.00005722RPM,那么其精度为:(60RPM-60.000057RPM)/6000RPM=-0.000001%<0.001%,图3的精度值很理想,但是速度波动性表现很差。
二、速度波动性受如下因素影响
(1) 编码器有限的分辨率以及速度环周期(分辨率越低,周期时间越长,速度波动就越大)。
(2) 不良的编码器安装方式会导致编码器反馈出现低频周期性波动。
(3) 伺服电机的齿槽转矩波动也会导致速度环下的低频周期波动。
三、结论
(1) 在实际应用中,受编码器有限的分辨率、安装和伺服电机制造等因素而导致的速度周期波动的影响要比单纯的速度精度更加重要,需要工程师在使用中考虑以上因素。
(2) 对于降低速度的波动性可以采用的手段有,选择高分辨率的编码器、缩短速度环周期、提高编码器安装的精度以及使用我们伺服系统中提供的齿槽转矩补偿功能等降低速度环波动性的影响,避免机械设备在高动态应用下出现振动和噪声。
在此处联系我们或致电与我们联系,以获取有关机器人解决方案的快速简便的报价。
了解更多安川机器人培训,安川机器人备件,请咨询:安川机器人代理